Сферы применения

Краткие техданные подобных роботов
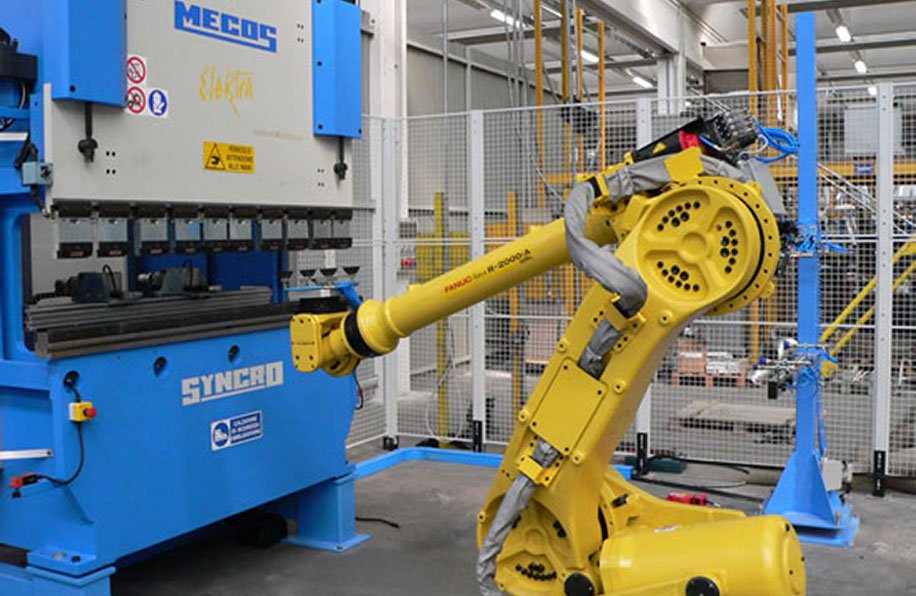
Грузоподъемность: до 700 кг.
Кол-во осей: до 6
Точность позиционир-я: до 0,07 мм
Ширина рабочей зоны: о 2500 мм
Угловая скорость: до 175 ⁰/с
Скорость линейного хода: до 2 м/с
Грузоподъемность: до 700 кг.
Кол-во осей: до 6
Точность позиционир-я: до 0,07 мм
Ширина рабочей зоны: о 2500 мм
Угловая скорость: до 175 ⁰/с
Скорость линейного хода: до 2 м/с
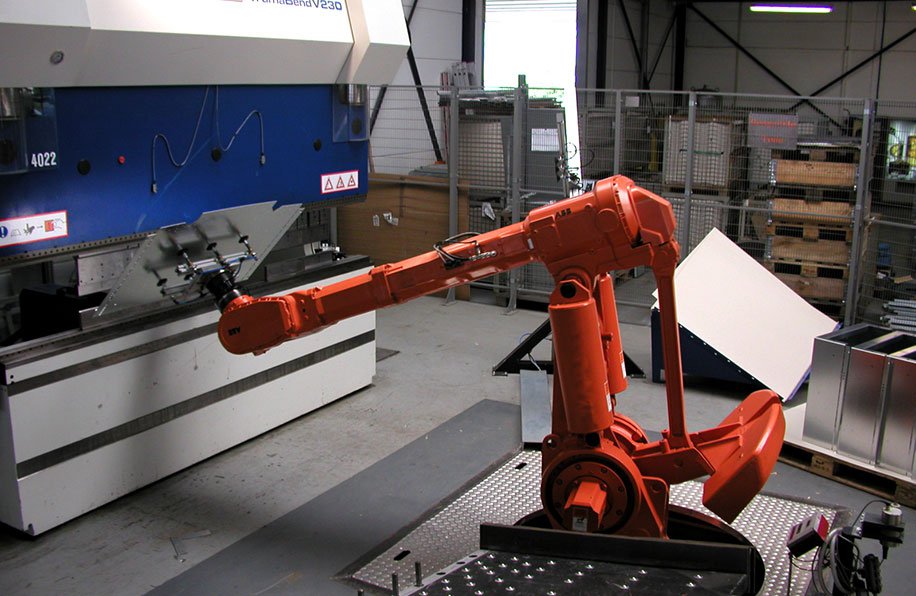
Концепция роботизированного гибочного процесса заключается в сопряжении гибочного станка с ЧПУ с промышленным роботом и применения вспомогательных приспособлений для гибки (кассета с заготовками, стенд выравнивания заготовки и т.п.). Подобные проекты находят все большее применение в современных производствах.
Обобщенно, процесс роботизированной гибки заключается в следующих этапах: промышленный робот берет заготовку в ячейке хранения, выравнивает заготовку относительно своей системы координат на специальном выравнивающем столе, подносит заготовку к станку, согласованно со станком осуществляет гибку, после чего укладывает готовое изделие в место хранения и начинает цикл заново.
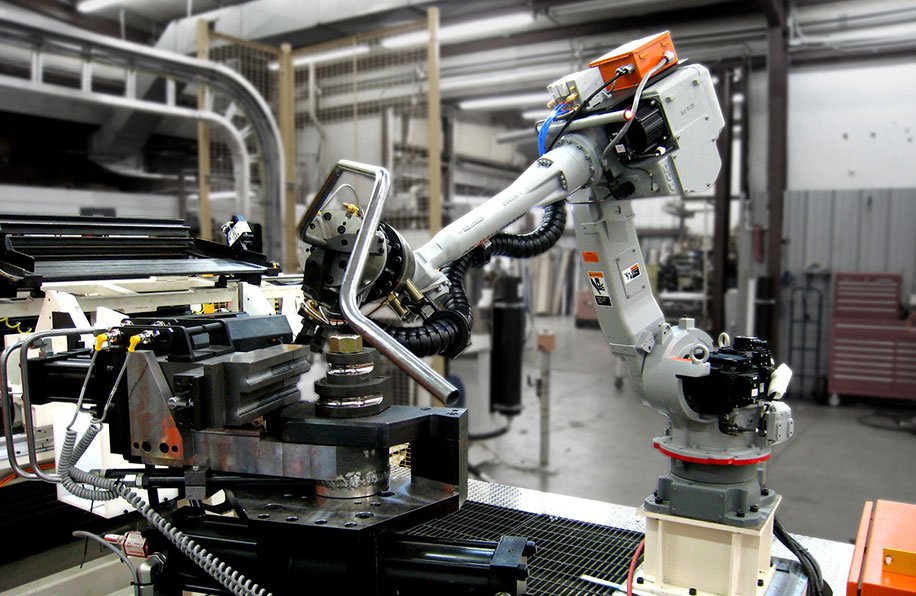
Интересным аспектом подобных проектов является возможность реализации комплексного подхода, начиная от момента выгрузки станков, производящих заготовки для обработки, (вырубные станки, станки лазерного раскроя и т.п.) и до момента получения полностью готового изделия после гибки.
Также решающим фактором в подобных проектах является габаритность и серийность изделий. С большими габаритами человеку работать физически затруднительно и для гибки приходится привлекать одновременно несколько человек. От этого может сильно пострадать конечное качество изделия, т.к. человеку очень трудно работать с большими габаритами и при этом выдерживать необходимую точность. Если одно и то же изделие выпускается серийно, то роботизация процесса гибки позволит высвободить работника, занятого в этом процессе, направив на более сложные участки.
Возможность применения на предприятиях: металлообрабатывающие производства, предприятия выпускающие изделия из листового металла.
Предпосылки к роботизации гибочного процесса
- габаритность изделий, с которыми человеку работать физически затруднительно
- серийный выпуск однотипных изделий
- низкая производительность вследствие сложности выпускаемых изделий
Результат роботизации процесса гибки
- высокая производительность процесса
- уменьшение кол-ва брака при гибочном процессе вследствие отсутствия ошибок
- работа с габаритными и массивными изделиями
- возможность длительной автономной работы при гибочном процессе
Видео
2014 - 2021 © ООО «РОБОТЕХ». Вся информация сайта roboteh.ru, включая текстовую, графическую и видео информацию, структуру и оформление страниц, защищены российскими и международными законами и соглашениями об охране авторских прав и интеллектуальной собственности (статьи 1259 и 1260 главы 70 "Авторское право" Гражданского Кодекса Российской Федерации от 18 декабря 2006 года N 230-ФЗ).
Задать вопрос